On 25 June, the final demonstration of the MaiSHU project (Multimodal perception and human-machine interfaces of semi-autonomous intelligent systems for humanitarian aid in unsafe and unstructured environments), a follow-up project to AHEAD, took place at the German Federal Armed Forces training area in Nordheim am Main, near Würzburg. The aim of the project is to develop innovative technologies for the assisted teleoperation of amphibious SHERP vehicles for humanitarian aid and the delivery of goods in difficult, unstructured environments.
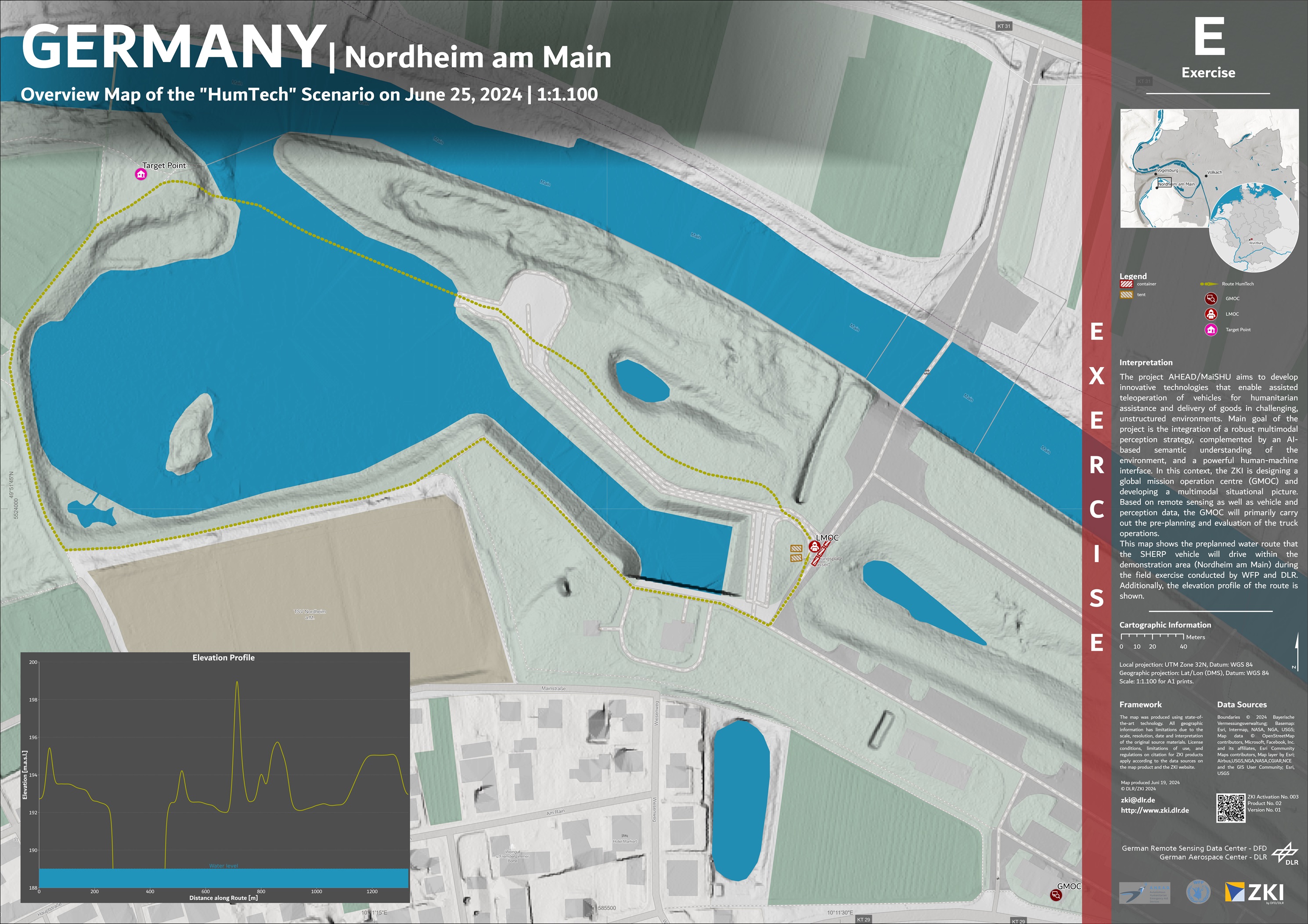
In a first scenario, the World Food Programme (WFP) used the SHERP to deliver food to a village in South Sudan that had been cut off by persistent rain and flooding. The SHERP navigated the dangerous and inaccessible route without a driver, controlled by the Local Mission Operation Centre (LMOC), which worked closely with the Global Mission Operation Centre (GMOC).
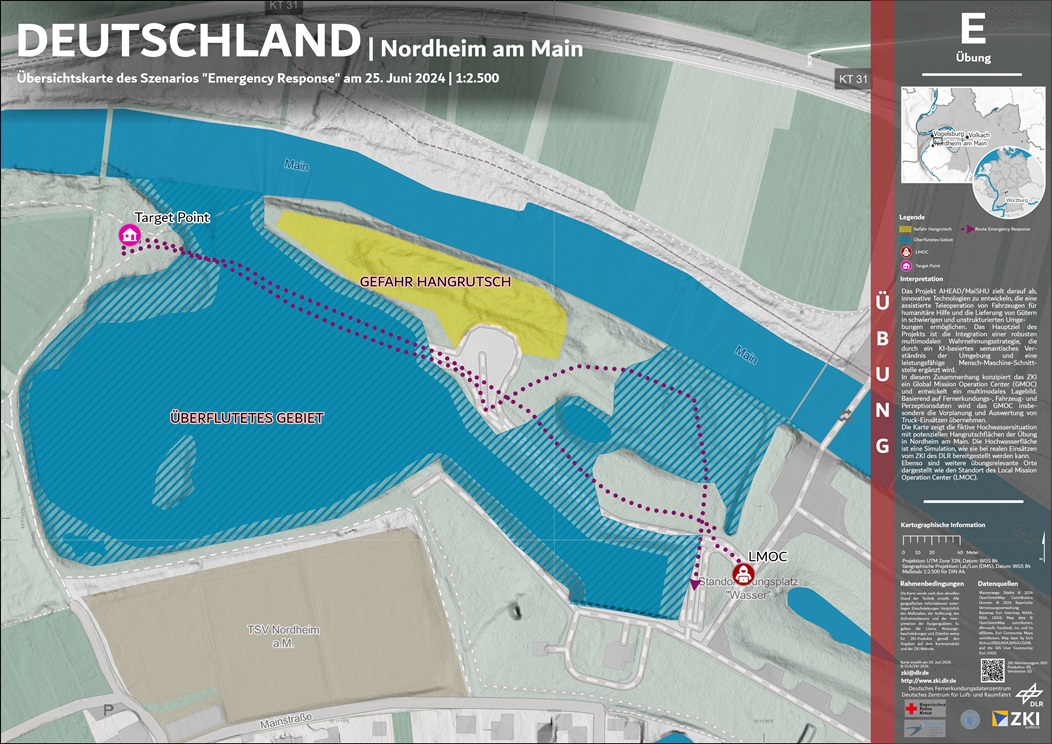
In the second scenario, the Bavarian Red Cross (BRK) coordinated the operation of SHERP to evacuate people from a flooded and landslide-affected area. GMOC/ZKI provided the BRK with several situation maps as well as the GMOC web application with crisis information for a comprehensive overview of the situation so that a safe evacuation could be ensured through the use of the SHERP.
The successful project demonstration shows the potential of teleoperated systems in humanitarian aid and disaster relief. Based on satellite, airplane and drone imagery (created by the Earth Observation Research Cluster, University of Wuerzburg), the ZKI has supported and carried out the pre-planning of the mission, the overall management of the operation, as well as the evaluation of the missions in the global control centre. For this purpose, the ZKI has developed an interactive 3D situation awareness application with various functions, such as the creation of viewsheds, the drawing of new routes or the export of planned route sections. The GMOC will provide mission coordinators and teleoperators with all relevant geoinformation of the target area. The displayed information includes an overview of the region's topography, characteristics of potential routes, radio coverage and semantic data, e.g. crisis information (floods) and relevant objects along the truck route (obstacles, houses or bridges).
Products
Germany – Nordheim am Main – Exercise– P03 – Overview Map of the Demonstration Setup June 25, 2024